As some of you may already know, I've been tinkering with the idea of an electronic ignition for some time. I've come to realize that I already have too many demands on my time and so I'm making the results of my work public in the hopes that you knowledgeable folks can carry on where I'm leaving off.
With that in mind, my only request is that those of you looking to make use of this information please post your results into this thread so that the community can benefit.
The majority of the work remaining is to test the code that has been written and then optimize it for use. My simulated tests have been promising so far, but I have yet to hook it up to a bike or anything of the sort...
Here's what you're going to need in your tool chest:
*Honeywell SS41 Hall Effect Sensor IC
*Some mini rare earth magnets
*PIC16HV540 microcontroller (datasheet here: http://ww1.microchip.com/downloads/en/DeviceDoc/40197b.pdf)
*20Mhz crystal oscillators (the more precise the better)
*USB PIC programmer (available on eBay for about $15, make sure it can handle a 20-pin microcontroller)
*Assorted electronics supplies like a soldering iron, circuit boards, resistors, diodes, etc (all Radio Shack kinda stuff)
*MPLAB Integrated Development Environment for your home PC (with embedded C compiler, something like HI-TECH C will work)
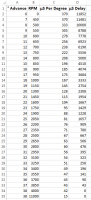
*Digital spreadsheet for calculating timing delays in the software (Excel or OpenOffice or something like that)
Parts for this project should run between $10 and $20, but expect to spend a lot of time on it. You need to modify the points plate and advancer (or, even better, get a rotor fabbed up), solder a bunch of stuff, flash the microcontroller, install and configure software on your PC... etc, etc, etc.
More to come in the next few days...
EDIT:
I've changed some of the hardware requirements as this project has progressed. I've abandoned the PIC in favor of an Arduino setup. The hardware has been a lot easier to work with and the code libraries for the Arduino have greatly simplified the necessary tasks.
The Hall Effect sensor that is being used for this project has been swapped over to an Allegro A1120LUA-T. No need for the chips, programmers, or oscillators (all this is handled on-board by the Arduino setup). The development environment I'm now using is Atmel Studio and the open source program Sketch. The Arduino Uno is about $20-$30 and plugs right into your PC via USB. You'll still want the magnets and assorted electronics components, however.
With that in mind, my only request is that those of you looking to make use of this information please post your results into this thread so that the community can benefit.
The majority of the work remaining is to test the code that has been written and then optimize it for use. My simulated tests have been promising so far, but I have yet to hook it up to a bike or anything of the sort...
Here's what you're going to need in your tool chest:
*Some mini rare earth magnets
*PIC16HV540 microcontroller (datasheet here: http://ww1.microchip.com/downloads/en/DeviceDoc/40197b.pdf)
*20Mhz crystal oscillators (the more precise the better)
*USB PIC programmer (available on eBay for about $15, make sure it can handle a 20-pin microcontroller)
*Assorted electronics supplies like a soldering iron, circuit boards, resistors, diodes, etc (all Radio Shack kinda stuff)
*MPLAB Integrated Development Environment for your home PC (with embedded C compiler, something like HI-TECH C will work)
*Digital spreadsheet for calculating timing delays in the software (Excel or OpenOffice or something like that)
Parts for this project should run between $10 and $20, but expect to spend a lot of time on it. You need to modify the points plate and advancer (or, even better, get a rotor fabbed up), solder a bunch of stuff, flash the microcontroller, install and configure software on your PC... etc, etc, etc.
More to come in the next few days...
EDIT:
I've changed some of the hardware requirements as this project has progressed. I've abandoned the PIC in favor of an Arduino setup. The hardware has been a lot easier to work with and the code libraries for the Arduino have greatly simplified the necessary tasks.
The Hall Effect sensor that is being used for this project has been swapped over to an Allegro A1120LUA-T. No need for the chips, programmers, or oscillators (all this is handled on-board by the Arduino setup). The development environment I'm now using is Atmel Studio and the open source program Sketch. The Arduino Uno is about $20-$30 and plugs right into your PC via USB. You'll still want the magnets and assorted electronics components, however.
")



