We noticed you are blocking ads. DO THE TON only works with community supporters. Most are active members of the site with small businesses. Please consider disabling your ad blocking tool and checking out the businesses that help keep our site up and free.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
1976 Puch Maxi - APuchalypse Now
- Thread starter Sonreir
- Start date


Made a few quick changes. Decided to swap batteries and go with a 12V system instead of 6V.
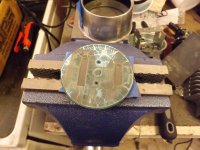
Also started gutting an old CB350 speedometer.
Also started gutting an old CB350 speedometer.
Attachments



iatethepeach
Coast to Coast
Sweet. Do those tubes hold up to vibration pretty well?
Joe Suzuki
Been Around the Block
Nixie Tubes! I'm so in now. Can't wait to see how that works out!
maxDTM said:Had to google what a nixie tube is... I'm assuming this is going to be mashed up with that speedometer bucket somehow?
That's the plan. Let's hope the execution work out.

OK... here's some entirely untested code which should be pretty close to what's needed. It's definitely not efficient as it could be. I could simplify out a lot of the math, but I kept everything simple and (hopefully) easy to follow in case anyone else wanted to try something similar. The code calculates everything in Metric and then converts to Imperial so that our friends outside the USA, Britain, Liberia, and Myanmar can also use it.
Code:
#include "NixieTube.h"
#include "math.h"
const int COUNT = 2;
const float TIRE_DIAMETER_IN_INCHES = 21.89;
const int HALL_SENSOR = 2;
const float PI_APPROX = 3.1415;
const float MM_PER_INCH = 25.4;
const unsigned int MS_PER_HOUR = 3600000;
const unsigned int MM_PER_KM = 1000000;
const float KM_PER_MILE = 1.60934;
bool triggered = false;
unsigned long elapsed = 0;
float tireCircInMm = 0;
unsigned int MAX_SPEEDO_VAL = pow(10, COUNT);
NixieTube tube(11, 12, 13, 10, COUNT);
// pin_ds, pin_st. pin_sh, pin_oe(pwm pin is preferred), COUNT
void speedoTrigger()
{
triggered = true;
}
void setup()
{
pinMode(HALL_SENSOR, INPUT); //setup the pin to accept input from the hall sensor
attachInterrupt(0, speedoTrigger, RISING); //speedometer sensor interrupt
tireCircInMm = TIRE_DIAMETER_IN_INCHES * PI_APPROX * MM_PER_INCH; //get the diameter in mm
for(byte i=0; i < COUNT; i++)
{
tube.setBackgroundColor(i, Blue); // set background LED light to blue for all of the nixies
}
tube.setBrightness(0xff); // brightness control, 0x00(off)-0xff
tube.display(); //turn it on
}
void loop()
{
if(triggered)
{
unsigned int pulsesPerHour = 0;
float kmPerHour = 0;
float mph = 0;
triggered = false; //reset interrupt value so we can come back to this code the next time the wheel goes around
elapsed = millis() - elapsed; //get the number of milliseconds that have elapsed since the last trigger event
pulsesPerHour = MS_PER_HOUR / elapsed; //number of pulses per hour at the current rate
kmPerHour = pulsesPerHour * tireCircInMm / MM_PER_KM; //1000000 is the number of mm in a km
mph = kmPerHour / KM_PER_MILE; //convert from km per hour to miles per hour
while(mph > MAX_SPEEDO_VAL) //reduce to the correct number of significant digits so we don't overflow the display (e.g. two nixies mean 99 max, three nixies 999 max)
{
mph = mph - MAX_SPEEDO_VAL;
}
tube.printf("%i", (int)mph); //output the value to the nixie(s) in serial mode
tube.display(); //show it
}
}iatethepeach
Coast to Coast
Sonreir said:Code:while(mph > (COUNT * 10)) //reduce to the correct number of significant digits so we don't overflow the display (e.g. two nixies mean 99 max, three nixies 999 max) { mph = mph - (COUNT * 10); }
I think you want those "COUNT * 10" to be "10 to the power of COUNT". Though, personally I think it'd be cooler to peg it at "(10 to the power of COUNT) - 1", to retain more of the analog vibe.
DohcBikes said:What in holy nerd hell is going on here
Watch and learn.
DohcBikes
Fuck You.
HA!!... I kinda put that one on a tee for ya didn't I.Sonreir said:Watch and learn.
More of an out loud thought than a question but I am no doubt glued to the build and have already learned a few things. Proceed.
;D
Got a cheapo bicycle speedometer on the way from eBay.
http://www.ebay.com/itm/310958066647
The plan is to utilize the Hall sensor and ditch the unit.
The magnet is designed to clamp onto a spoke and the sensor should mount to the inside of the forks.
Hopefully this thing puts out a square wave, but we'll see.
Got a cheapo bicycle speedometer on the way from eBay.
http://www.ebay.com/itm/310958066647
The plan is to utilize the Hall sensor and ditch the unit.
The magnet is designed to clamp onto a spoke and the sensor should mount to the inside of the forks.
Hopefully this thing puts out a square wave, but we'll see.


